Week 18: Planning Final Project
The plan is to make a balancing robot that will uses capstan drives. Similar to this.
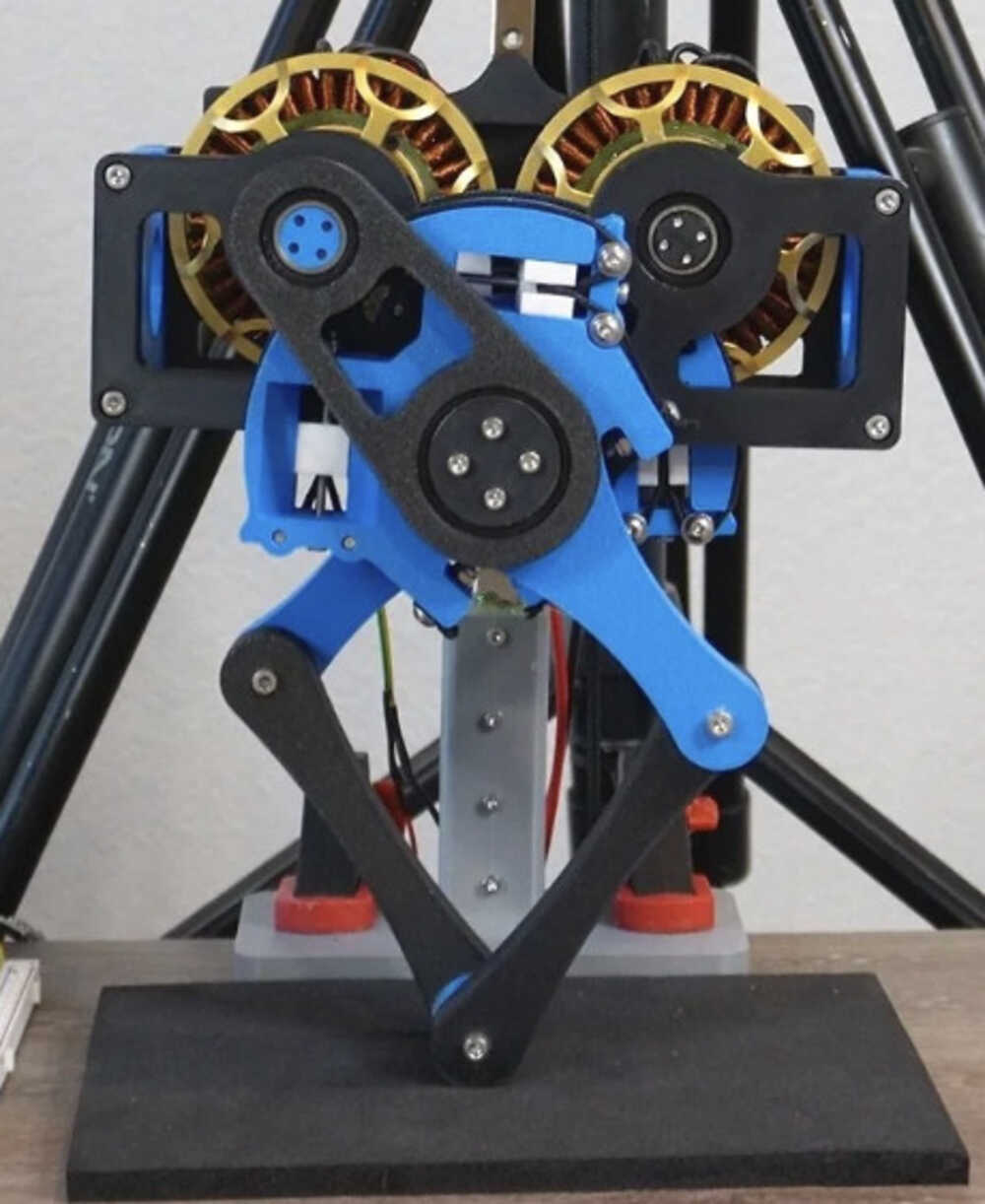
The nice thing with capstan drives is that they have almost zero backlash making for very percise movements. However...you can't do continous rotaions which makes it a little challenging for a self balancing robot.
Below are some links and a video from Aaed Musa.
Heres a link to a working Capstan Drive project with materials. Heres the github to the STP files and more details on his project.
In this video he is using 3D printed parts mixed with metal rods to add strength. I will be using 3D prints as well but I will have to do a lot of redesign as he uses very expensive motors and drivers. Also the rope he uses is in Europe so that could be a very long wait time.
Cost of main materials:
- Eagle Power 90KV BLDC Motor = $80
- ODrive S1 FOC Controller = $149
- Dynamica DM20 = $???
- 3D prints = $cheap
- Metal rods =
- Total = >$300
I think the best opptunity at this point is to use stepper motors with encoder drivers because it will be less expensive and I already have them with me so I can start testing the capabilites of this motor.