

I dedicated this week to the moving stage I am dubbing RoundaBot. After a lot of CAD and waiting for parts to arrive, I finally had enough to begin. This stage includes two drive modules - a 24v motor, lovejoy coupling, and keyed axle connecting to a wheel. Unfortunately, I still have yet to receive one set of lovejoy couplings and one axle, meaning I can't start on mechanical fitment, but I can get an electronic prototype completed.
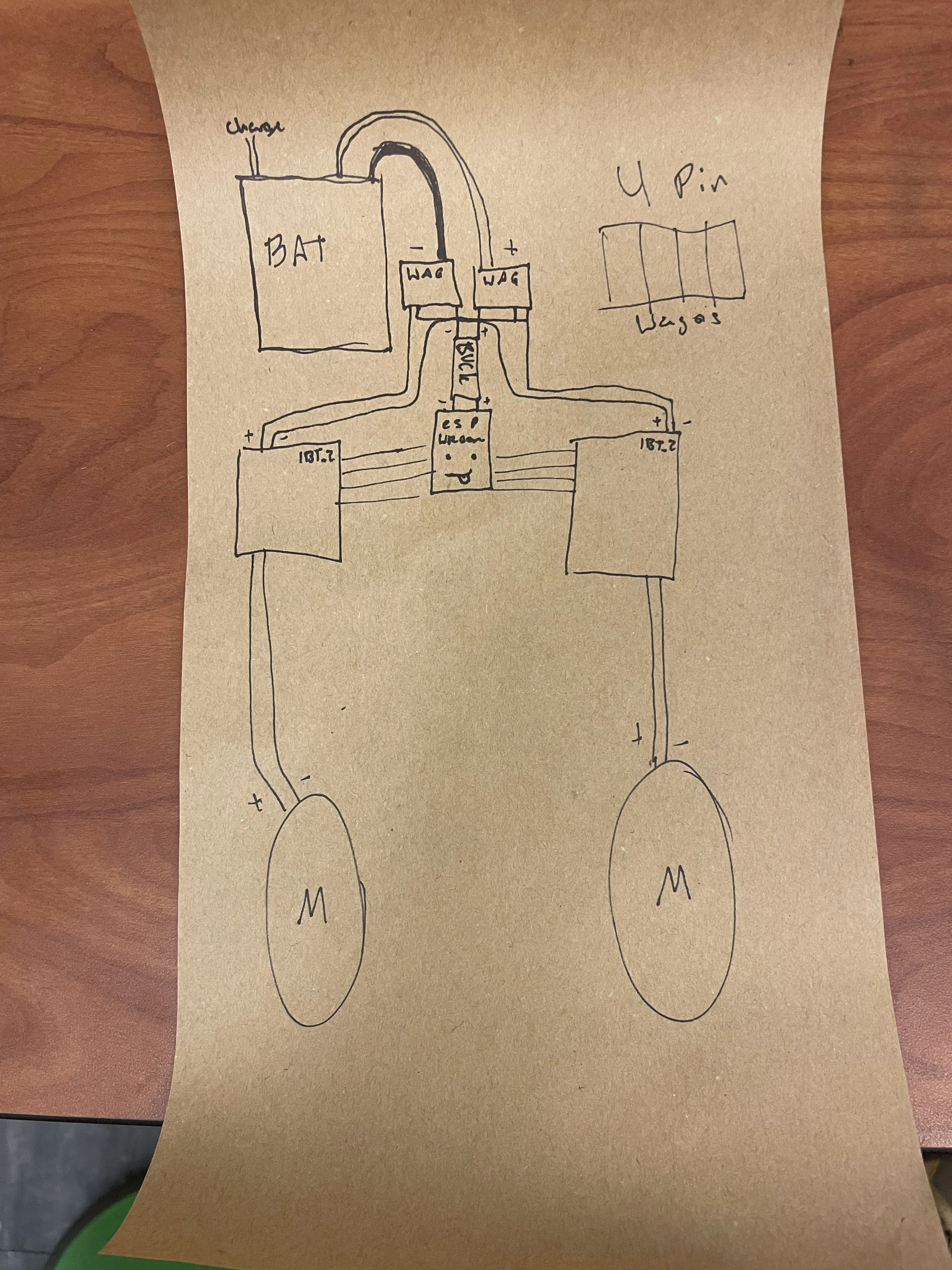
I ended up cutting two 3.5 ft diameter circles out of ¾" plywood - one including cutouts for the wheels and motors. I also cut and drilled motor mounts from 6063 aluminum. After getting that done, I spent a lot of time figuring out the proper PWM and using two IBT_2 drivers to drive both motors. I used a buck converter to convert the 24v battery output to 5v for the ESP32. With this whole system wired up, I created a website to test the speed and direction of both motors on wifi, which worked perfectly. The next steps will be assembling and attaching mechanical features, chamfering, painting, and grip taping the wood. Then, I can focus on dialing in the movements and controls.